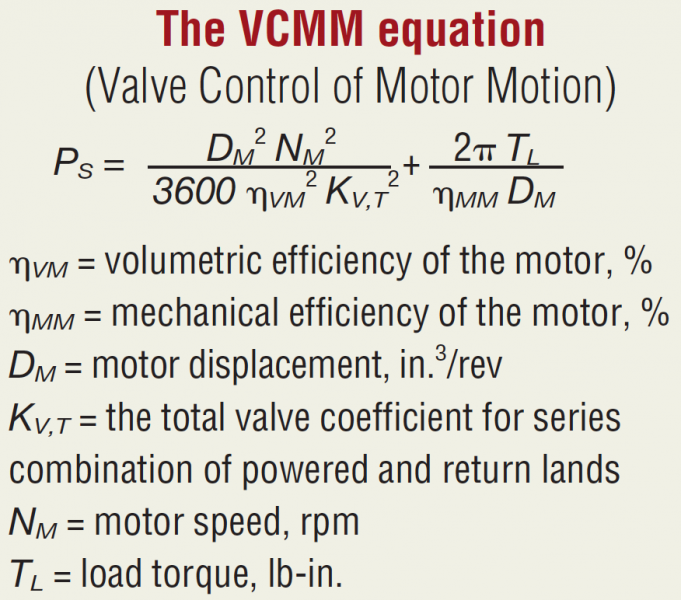
我们必须知道应用中的负载转矩,以正确预测3000吨玻璃钢汽车后轮罩四柱液压机系统的速度增益。由于负载可能非常复杂,因此负载转矩很少是恒定的。因此,
山东威力重工通常必须求近似或分析零负载和最大负载的极值。
 图片仅供参考,详情请咨询18306370979(陈女士)
图片仅供参考,详情请咨询18306370979(陈女士)
我们可以使用VCMM方程计算速度增益。通过一定量的代数操作,可以根据其他变量和电路参数求解轴速度。这样做表示电机速度与阀门系数变化之间的关系为线性函数。也就是说,如果阀门区域开口加倍,如果所有其他参数保持不变,速度将加倍。
电控制输入信号调节阀门系数,阀门的电驱动始终由放大器提供。此外,增益是可调节的,因此用户组装速度控制环,然后小心地增加电子增益,直到达到所需的性能。在大多数情况下,用户甚至不知道应用时的实际速度增益!
如果阀门的流量计量特性是合理线性的,则电子控制输入和阀门系数之间存在线性关系。因此,在这些条件下,电动机速度是指令信号的线性函数。但是,这个讨论适用于开环系统,但我们对闭环性能感兴趣。
关闭循环
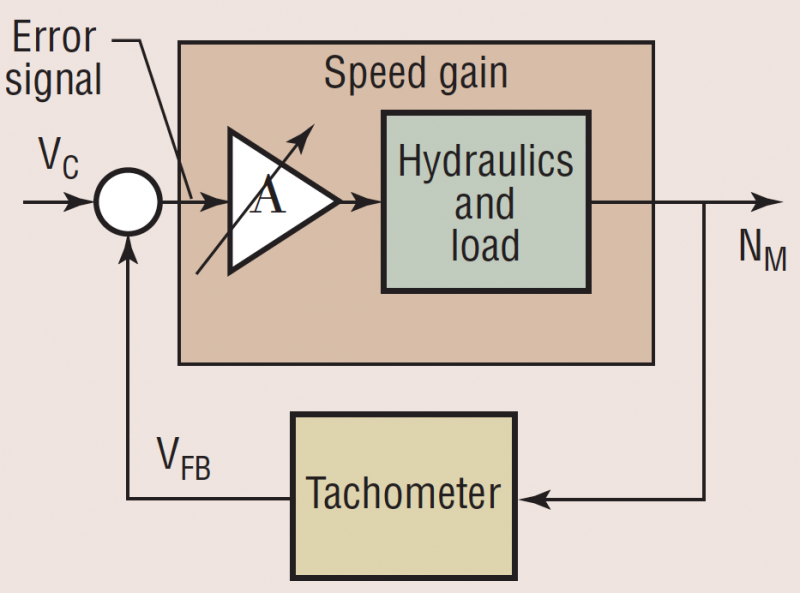
图1.速度增益由放大器加上液压和负载组成。错误是命令和反馈信号之间的差异。
闭环控制也很容易适应。模拟放大器从命令信号中减去反馈信号以产生误差信号。没有反馈,命令信号也是错误信号。在3000吨玻璃钢汽车后轮罩四柱液压机数字控制系统中,错误是通过简单的计算产生的。在任何一种情况下,当反馈连接到伺服或比例放大器的反馈输入端子时,系统可以如图1所示。电子放大器A显示为可调节,因此总增益(在此例如,误差信号的rpm / V可以设置为任意高或低的值。
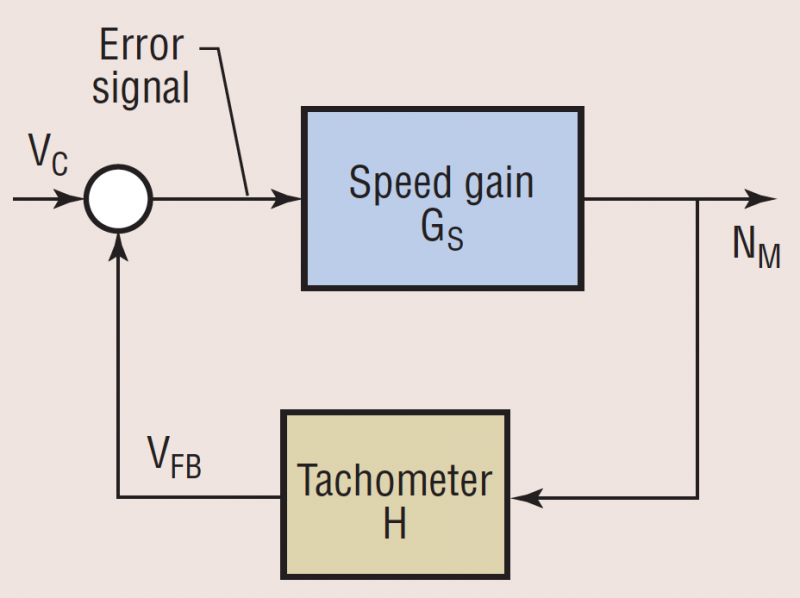
通过组合速度增益块中的元素并将它们完全集成到称为GS的代数变量中,可以简化图1中的框图。结果如图2所示。块图和控制系统设计的通用语言使用符号H来表示反馈路径。在这种情况下,它仅由转速计组成,其输出为反馈电压VFB。
建立关系
图2.图1的框图可以减少到两个块,前向增益和来自转速计的反馈。
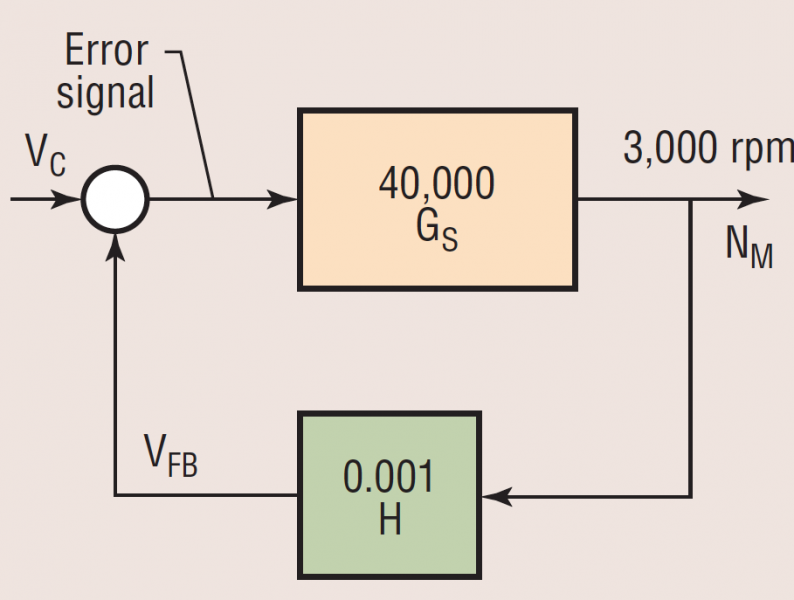
正如我们在前一版中得出的结论,当控制环路稳定时,误差电压不能为零。如前所述,假设转速计常数H为1 V / 1000 rpm。我们还需要知道速度增益GS。实际值可能是40,000 rpm / V.
图2可以在块中重新绘制数值,如图3所示。现在我们假设输出速度为3000 rpm。输出功率为3000 rpm,速度增益为40,000,误差电压为3000除以40,000或0.075 V.另外,输出速度为3000 rpm时,转速表输出电压必须为3.000 V.因此,指令输入电压必须为比反馈大0.075 V,或命令3.075 V减去反馈以与误差电压值一致。3000吨玻璃钢汽车后轮罩四柱液压机系统处于平衡状态,而错误则不然零!这里有两个原则。首先,应该清楚的是,速度增益越大,误差电压越低。其次,仅仅因为受控变量是对系统输入的反馈,该变量不一定是完全调节的。此外,即使命令输入是恒定的,其中任何参数(例如供应压力,负载转矩或电机位移)引起的速度增益的任何变化都将导致输出速度的变化。
图3.为了便于说明,评估了两个增益,并假设输出功率为3000 rpm。
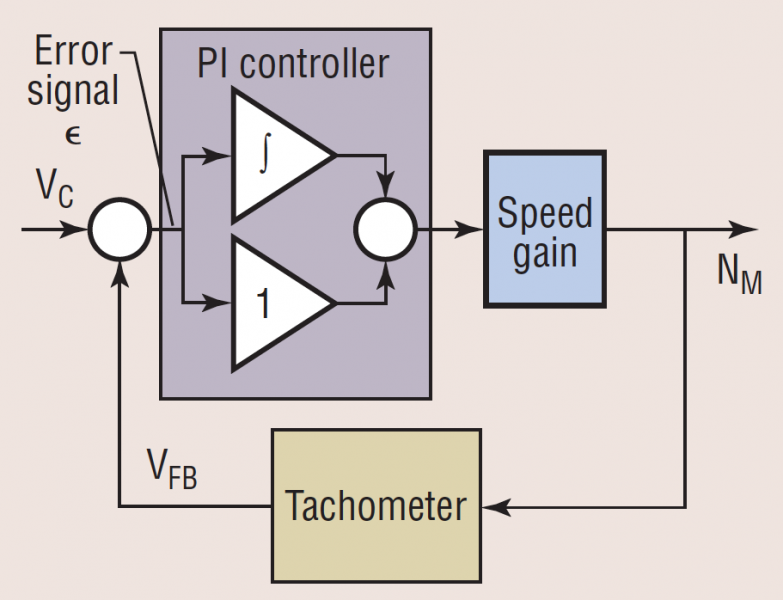
此时讨论的简单比例控制器不是集成控制器,而是需要克服速度控制环路中的稳态误差问题。这种控制器通常称为PID控制器。图4中所示的变化是PI控制器,即缺少导数函数。它通常用于电液技术,因为经验已经发现这是所有需要的。
图4中的比例函数用粗体数字1表示,表示它的增益为1,这使计算更容易。实际上,比例增益通常可在商用控制器上调节。注意,比例元素和积分器(由积分符号表示)共享公共输入,即误差信号。两个输出相加在一起,它们的总和构成了速度增益模块的输入。
积分控制的功能及其变化是将稳态误差降低到零。在偶然的情况下,命令和反馈是平等的。如果我们想要一个1520转/分的速度,转速表是0.001 V / rpm,那么命令信号应该设置为1.520 V.使用积分控制可以更容易地根据命令预测输出。
图4.通过集成控制器可以将稳态误差降低到零。
这引出了一个问题,“增加一个积分器如何将稳态误差降低到零?” 在简单的比例情况下,该误差是必要的,因为必须打开阀门以使电动机以某种速度转动。该误差是简单比例情况下唯一可用的电压,因此命令和反馈必须为非零。
现在考虑积分器,涉及无限求和或积累。物理积分器的特性 - 如上面控制器中的那个 - 是这样的,如果输入信号不为零,则输出正在改变。当输入为零时,输出保持其最后或累计值。我们说它正在整合其输入 - 在这种情况下是错误信号。
理想化的集成商
牢记集成商的特性,我们将重新审视3000吨玻璃钢汽车后轮罩四柱液压机系统的运行情况,以了解控制器中发生的情况和输出速度。使用图4的控制器,假设在电机停止时突然施加3.075 V的输入指令。电机将快速加速至约3000转/分钟,此时误差将为0.075 V.这将使阀门保持打开状态,同时达到新的平衡点。
现在,集成商开始接管。由于其输入不为零,因此其输出将开始增长。假设它增长到0.030 V.这会增加到比例输出,增加到3.040 V.因此,速度上升到3040 rpm,产生3.040 V的反馈电压,产生0.035 V的误差信号(3.075 - 3.040)。但错误不是零,因此积分器的输出增长更多。假设它增长到0.070 V.现在速度上升到3070 rpm,反馈为3.070 V,误差现在为0.005 V - 仍然不为零。然而,趋势已经确立。
只有当误差达到零时,积分器输出才会增长。该条件要求反馈电压为3.075V,输出速度为3075rpm。如果我们现在将命令减小到3.000 V,我们可以合理地预期输出速度为3000 rpm并且误差为零。
这个讨论非常理想化,所有真正的伺服环路都有一些误差。因此,速度不会精确到3000转/分,并且由于任何3000吨玻璃钢汽车后轮罩四柱液压机控制系统固有的噪音,它不会完全恒定。但是,它仅比比例控制更接近。控制回路的不稳定性也是可能的。
重要考虑因素
由于其他稳态误差问题,速度环中的积分控制非常普遍。此外,整体控制还会带来性能成本。
首先,考虑到集成商需要一些时间来完成集成。这意味着会出现一些响应性损失。我已经计算出在增加积分控制后,位置伺服的稳定状态增加约33%。需要对速度控制回路进行更多研究。但是,如果没有进一步的信息,33%的结算时间罚款可能是合理的猜测。这意味着如果速度环仅由比例控制构成,并且它将在例如360毫秒内稳定到稳态,那么在添加PI控制器之后,预期建立时间可以增加到大约480毫秒。
其次,考虑响应速度与积分增益直接相关。增益越高,积分器充电的速度就越快,环路的稳定速度就越快。尝试以更高的积分增益加速环路将很快导致系统不稳定 - 连续寻找静止点并且永远不会消失。
与简单的比例控制相比,积分控制总是创建一个具有更多稳定性问题的系统。即使在3000吨玻璃钢汽车后轮罩四柱液压机系统被调谐以进行稳定操作时,也可以预期弹性操作,其中输出速度超过稳态目标,但最终稳定。