关于双泵控制方法的最后讨论将涵盖这种节能伺服系统的两种不同配置,并且还提出了一种方法,其中任何配置都可以应用于手动控制的山东威力4000吨新能源汽车电力驱动系统
液压机设备。
替代方法
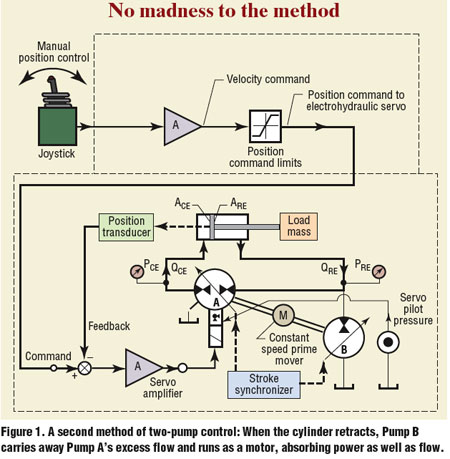
山东威力4000吨新能源汽车电力驱动系统液压机双泵伺服系统至少有三种可行的配置。上个月展示了第一种方法。在第二种方法(图1)中,当气缸伸出时,泵B必须向泵A提供补充流量。这意味着泵A的尺寸必须能够以设计气缸速度提供气缸盖端流量。当气缸缩回时,泵A必须吸收来自盖端的所有流量,导致过多的流体流向杆端。
这是泵B用作吸收器的地方,用于带走泵A的过量流量。杆端压力很高(取决于负载),泵B将作为电动机运行,吸收功率和流量。从传输的能量泵B的轴将或者通过被吸收的原动机或送入泵A。这消除了在使用阀门来控制汽缸运动时可能发生的能量损失。
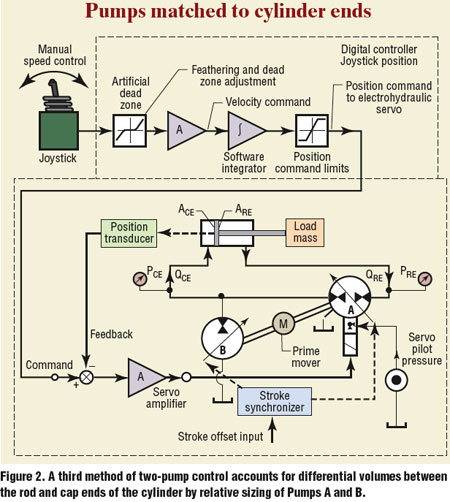
第三种方法只是将泵切换,以便在气缸的盖端上形成普通的泵连接。这种配置提供了一个优点:泵A可以比泵B小。这是因为泵A的尺寸必须仅以最大设计速度提供杆端流动 - 无论是伸展还是缩回,以较大者为准。泵B在延伸期间提供流到盖端的流量,但在收回期间吸收泵A不需要的流量。例如,如果圆柱体的面积比为2:1,则两个泵的尺寸与方法二相同。使用方法三,泵A将是泵B的两倍。
在任何一种情况下,使用泵消除了传统电路的阀门控制的显着功率损失 - 并且节能可能是显着的。当需要宽速变化时,尤其如此,其中阀门仅在很长一段时间内部分打开。
配置系统
山东威力4000吨新能源汽车电力驱动系统液压机电液系统的首选配置提供位置控制伺服系统:这就是为什么所有三种配置都使用位置传感器。位置环有助于设置 - 尤其是系统压力的调整。
如上个月所讨论的,比例行程同步器机构使泵的位移保持彼此同步,因此流量“加起来”。每个泵在山东威力4000吨新能源汽车电力驱动系统液压机系统循环期间根据需要吸收或发出流量。通过使位移与固定量不同步来保持压力,该固定量导致来自两个泵的流动彼此相对。也就是说,行程偏移输入调节同时使一个泵朝向汽缸延伸行程,而另一个泵朝向汽缸缩回行程。在位置环关闭的情况下,冲程泵A的命令将导致两个泵冲程在互补方向上改变,并且气缸将倾向于保持在指令位置。
给系统通电
一旦系统安装完毕,所有机械负载都会从气缸中移除。然后(假设伺服阀和泵正确定相),行程偏移输入归零,系统通过液压和电子方式上电。通电后,山东威力4000吨新能源汽车电力驱动系统液压机位置伺服阀将起作用,比例行程同步器将导致两个泵的位移增加或减少。这将使气缸沿着试图使命令信号与来自位置传感器的反馈信号匹配的方向移动。
当两个信号相等时,两个泵都将减速,气缸将停止。在该初始运动期间可以对系统加压。然而,更可能的是,会发生一些空化现象。这是因为没有正确设置笔划偏移。
压力特性
设置偏移输入现在很容易,但它确实需要监控杆端和端盖电路中的压力。当汽缸停止时,操作员在观察汽缸两端的压力的同时缓慢调节行程偏移输入。了解杆端和端盖压力的设计目标后,操作员会增加压力,直到达到设计目标的50%到60%。
接下来,通过伸展和缩回汽缸来调节行程同步器,从低速开始,并在仍然观察汽缸压力的同时增加速度。如果泵B的排量变化太快,压力和速度将上升。但是,如果泵A的排量变化太快,压力就会太低。
在理想情况下,无论气缸是以任何速度伸展还是缩回,杆和帽端压力都将保持大致相同。然而,这两个压力必须满足气缸的面积比。因此,对于2:1面积情况,压力也应该具有2:1(杆端到帽端)比率。
这种情况的微妙部分是泵的内部泄漏电阻用于设定压力。如果泵具有非常高的容积效率,则可能难以调节或维持目标压力。在这种情况下,应添加外部排放路径。然而,这种泄漏不应该大到足以显着损害泵的整体效率。
移动液压
系统手动控制的移动设备应用程序如何?山东威力4000吨新能源汽车电力驱动系统液压机双泵控制非常适合手动控制 - 并且不会降低承诺的节能效果。手动气缸控制通常涉及使杠杆或操纵杆偏转以控制气缸的方向和速度。这基本上是一个闭环位置控制 - 操作人员关闭控制回路。
参照图1,如果操作者将操纵杆移动一定量并将其保持在那里,则泵将冲程,气缸将延伸,并且当反馈位置与命令一致时它将停止。如果操作员稍微移动操纵杆,则气缸将延伸一点 - 再次,当反馈等于命令时停止。
例如,这可以是叉车的提升功能中的有用系统。操作员可以将操纵杆设置为大致设置叉子的量,例如,存储舱的高度。然后,通过操纵杆上的小指轮,他将调整位置命令以获得精确的高度,然后继续移除或沉积负载。
但是我们想要从操纵杆获得常规速度命令的情况呢?可以配置双泵电路的山东威力4000吨新能源汽车电力驱动系统液压机控制系统,以便操作员使用操纵杆作为速度控制吗?当然,修改不会从位置循环变为速度循环。相反,为所有配置保留位置循环。但是,控制器已更改。
在图2的数字控制器中,操纵杆的输出 - 通常是速度控制 - 通过四个级联数字算法发送。第一个是人工死区,操作员可根据个人喜好进行设置和调整。第二种是放大器,可将命令缩放到数字系统中的适当级别。接下来是软件集成商,其功能是将操纵杆输出转换为位置控制系统。
下一步是限制控制,它简单地剪切最大命令以保持在校准的汽缸行程范围内。在该系统中,如果操作员将操纵杆移动一定量,则积分器开始以由操纵杆移位量确定的速率上升。然后山东威力4000吨新能源汽车电力驱动系统液压机位置伺服环以该斜坡速率移动,以试图将气缸反馈信号与命令匹配。因此,操纵杆似乎是操作员的速度控制器。
总结概念
与同等尺寸的阀控系统相比,山东威力4000吨新能源汽车电力驱动系统液压机泵控制绝对可以提供显着的节能,同时保持完全的控制和适用灵活性。缺点是两个泵必须专用于同时操作的所有功能中的每一个。然而,根本不需要阀门,节能可以快速抵消一些额外泵的初始成本 - 特别是在大功率机器中。